Four-legged robots can do many complex tasks, but they struggle in places like forests or areas with lots of plants. This is because their computer brains aren’t very good at quickly dealing with all the things around them.
For us, it’s easy to move around in such places, but for these robots, even a small mistake can make them fall.
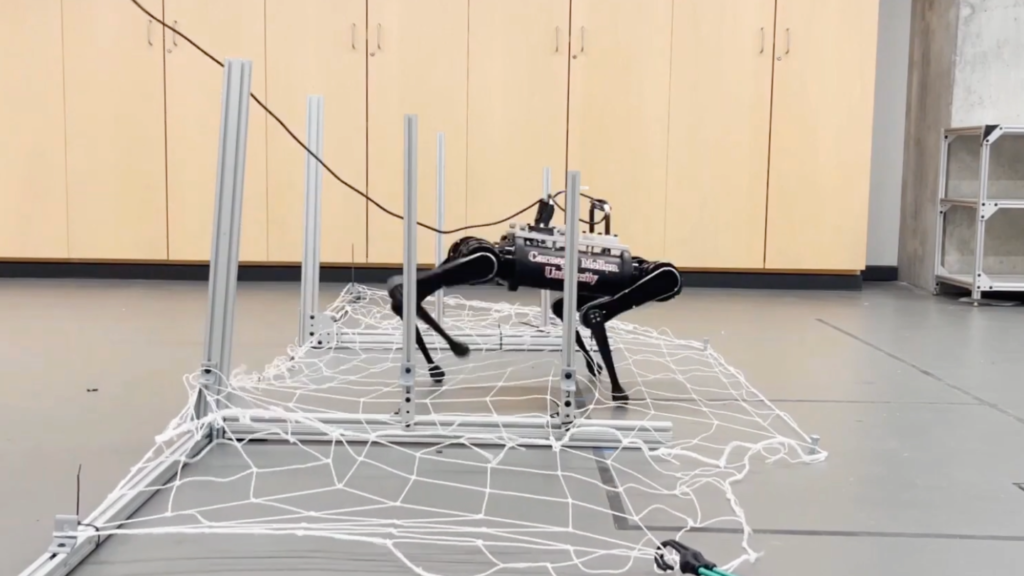
However, a group of scientists at Carnegie Mellon University’s College of Engineering tested their own robot dog on obstacle courses, and they found a good way to make robots work better in wild places.
They taught the robot dog to pull in its legs while walking when it sees something in its way. This makes it better at moving through obstacles.
“Obstacles in the real world can be hard like rocks or soft like vines. We want robots to know how to walk without tripping on both,” said Justin Yim, a professor from the University of Illinois Urbana-Champaign who worked on the project with Carnegie Mellon University.
The engineers tested different ways the robot walked while trying to move across a short path with low-hanging ropes blocking its way. When the robot took big steps or walked with its knees bent forward, it got stuck in the ropes.But when it quickly pulled its legs back after seeing an obstacle, it could easily cross the path without any problems.
“When you use robots outside, it becomes much harder because you have to be really careful with everything,” said David Ologan, a student studying mechanical engineering. “Your robot has to be strong and smart enough to deal with any unexpected things or things that might get in its way. It’s exciting to work on a problem that hasn’t been completely figured out yet.”
Wheeled robots are often better for cities because the ground is flat, and there are ramps and roads. But robots that can walk might be more useful outside.
Researchers think that if they add the ability to pull in their legs when needed to existing AI systems, it could help robots when they need to find people in outdoor emergencies. It could also help robots study the environment without harming it.
David Ologan said, “It’s interesting to see how legged robots can be useful in outdoor places with lots of plants. If you live in a city, a robot with wheels is probably better. There’s a balance between being able to do complicated things and moving efficiently.”
Facebook
Twitter
LinkedIn
Pinterest
Pocket
WhatsApp
Never miss any important news. Subscribe to our newsletter.